ПРИЛОЖЕНИЕ. Буквенные коды наиболее распространенных групп элементов; Рекомендуемая форма перечня элементов; Примерный перечень основных характеристик и параметров кинематических элементов;
ПРИЛОЖЕНИЕ
Таблица 1
Буквенные коды наиболее распространенных групп элементов
Буквенный код | Группа элементов механизмов | Примеры элементов |
А | Механизм (общее обозначение) | |
В | Валы | |
С | Элементы кулачковых механизмов | Кулачок |
Толкатель | ||
Е | Разные элементы | |
Н | Элементы механизмов с гибкими звеньями | Ремень |
Цепь | ||
К | Элементы рычажных механизмов | Коромысло |
Кривошип | ||
Кулиса | ||
Шатун | ||
М | Источник движения | Двигатель |
Р | Элементы мальтийских и храповых механизмов | |
Т | Элементы зубчатых и фрикционных механизмов | Зубчатое колесо |
Зубчатая рейка | ||
Зубчатый сектор | ||
Червяк | ||
Х | Муфты, тормоза | |
У |
Таблица 2
Рекомендуемая форма перечня элементов
Зона | Позиц. обозначение | Наименование | Количество | Примечание |
Таблица 3
Примерный перечень основных характеристик и параметров кинематических элементов
Наименование | Данные, указываемые на схеме |
1. Источник движения (двигатель) | Наименование, тип, характеристика |
2. Механизм, кинематическая группа | Характеристика основных исполнительных движений, диапазон регулирования и т.д. |
Передаточные отношения основных элементов. | |
Размеры, определяющие пределы перемещений: длину перемещения или угол поворота исполнительного органа. | |
Направление вращения или перемещения элементов, от которых зависит получение заданных исполнительных движений и их согласованность. | |
Допускается помещать надписи с указанием режимов работы изделия или механизма, которым соответствуют указанные направления движения. | |
Примечание. Для групп и механизмов, показанных на схеме условно, без внутренних связей, указывают передаточные отношения и характеристики основных движений | |
3. Отсчетное устройство | Предел измерения или цена деления |
4. Кинематические звенья: | |
а) шкивы ременной передачи | Диаметр (для сменных шкивов — отношение диаметров ведущих шкивов к диаметрам ведомых шкивов) |
б) зубчатое колесо | Число зубьев (для зубчатых секторов — число зубьев на полной окружности и фактическое число зубьев), модуль, для косозубых колес — направление и угол наклона зубьев |
в) зубчатая рейка | Модуль, для косозубых реек — направление и угол наклона зубьев |
г) червяк | Модуль осевой, число заходов, тип червяка (если он не архимедов), направление витка и диаметр червяка |
д) ходовой винт | Ход винтовой линии, число заходов, надпись «лев.» — для левых резьб |
е) звездочка цепной передачи | Число зубьев, шаг цепи |
ж) кулачок | Параметры кривых, определяющих скорость и пределы перемещения поводка (толкателя) |
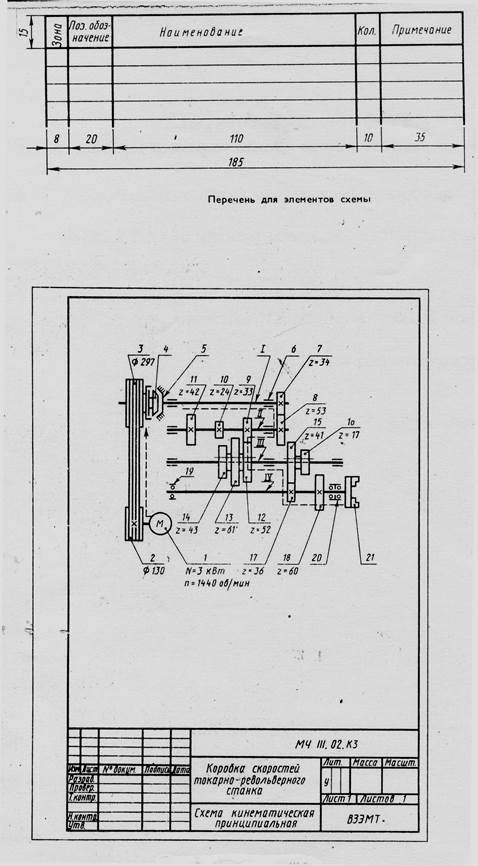

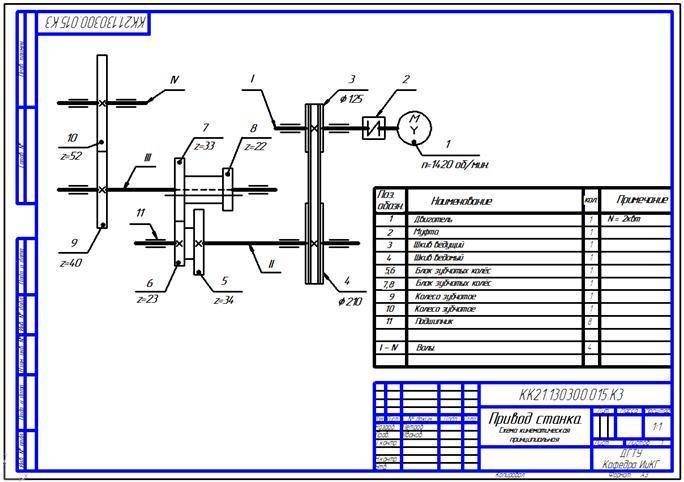

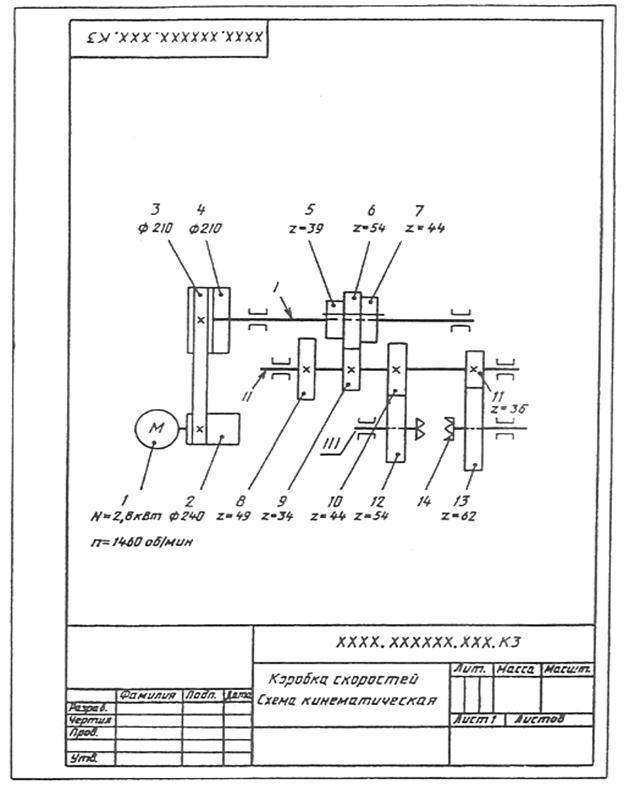
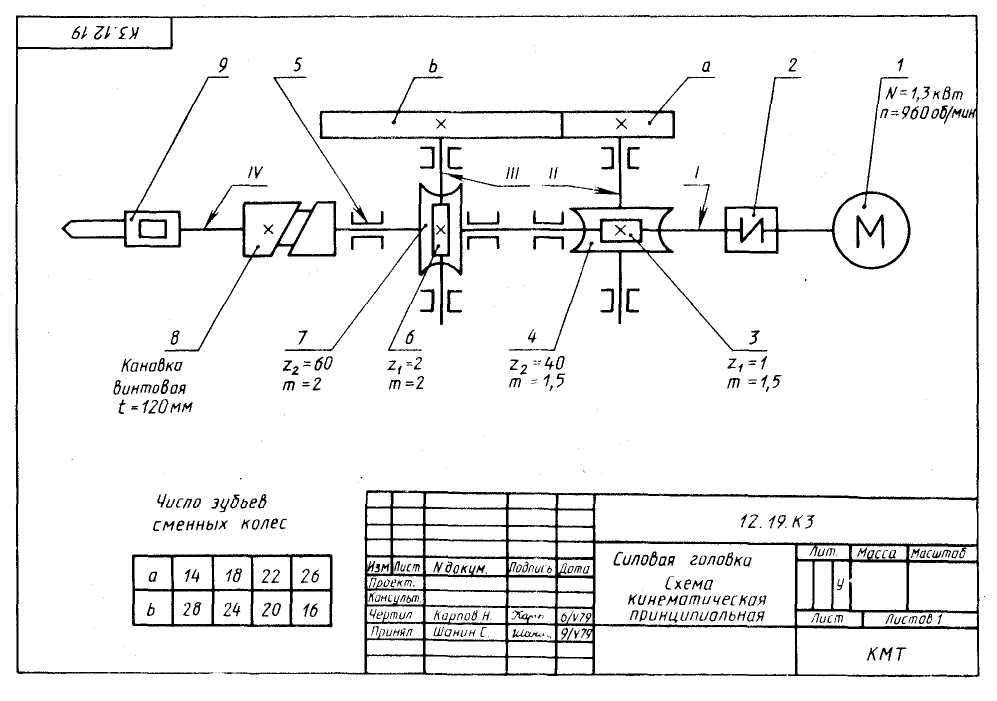

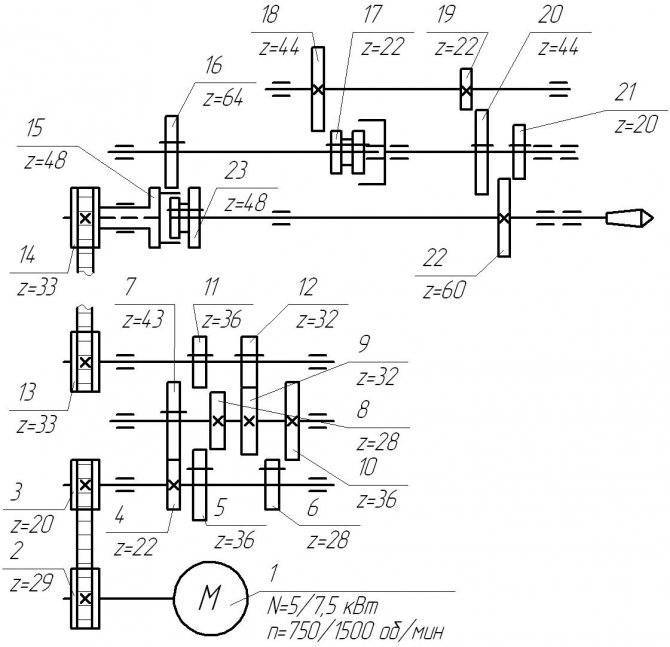
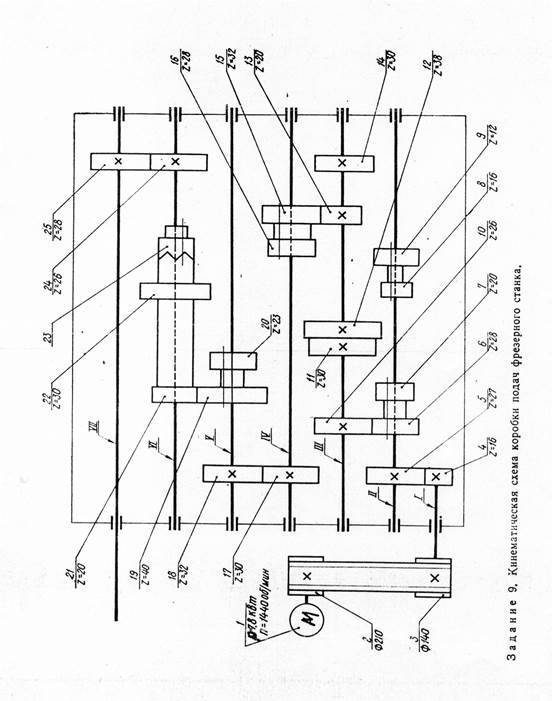
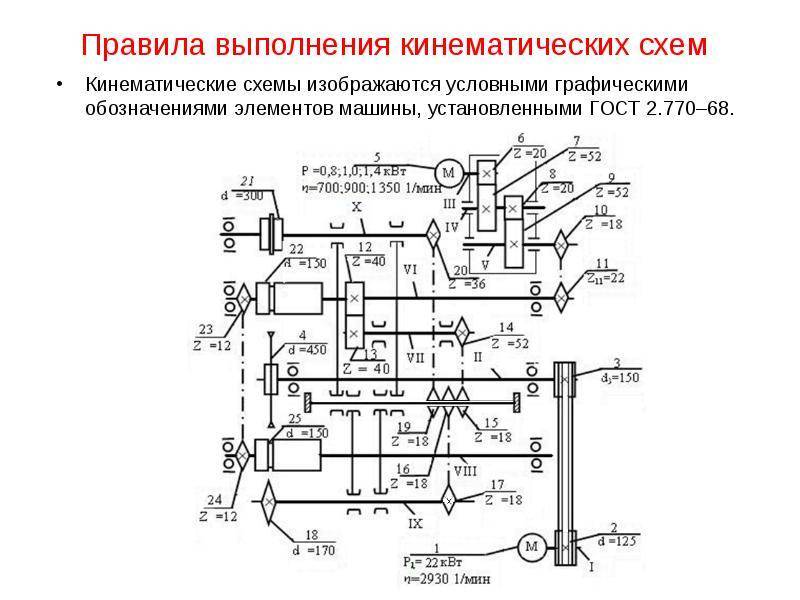
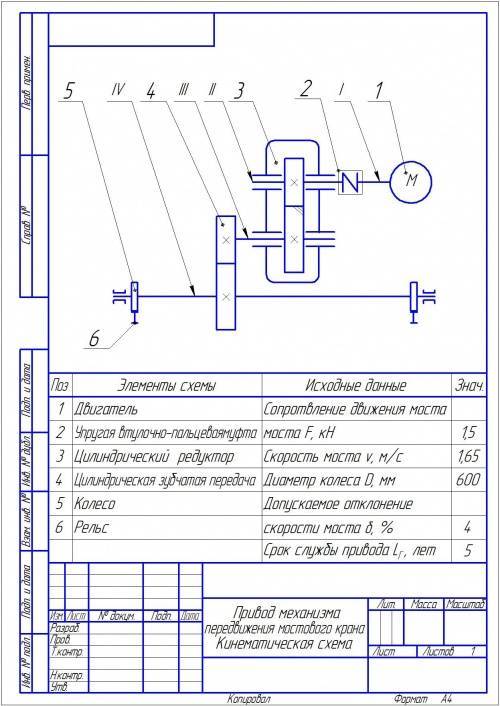
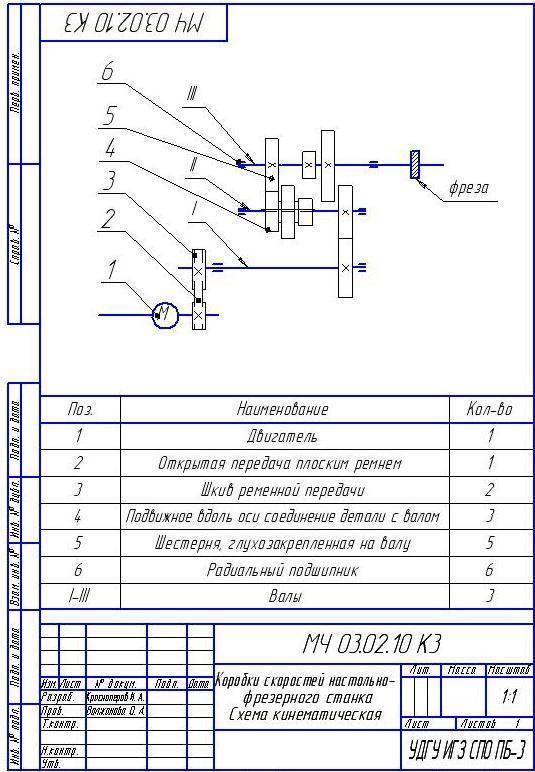
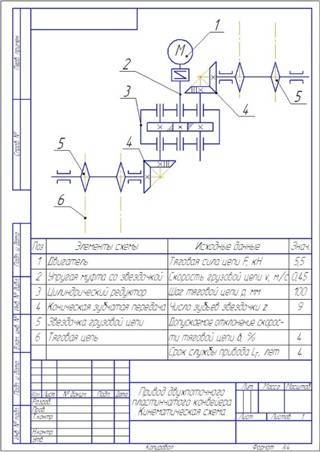
Пример выполнения кинематической схемы
РОССТАНДАРТ ФA по техническому регулированию и метрологии
НОВЫЕ НАЦИОНАЛЬНЫЕ СТАНДАРТЫ: www.protect.gost.ru
ФГУП СТАНДАРТИНФОРМ предоставление информации из БД «Продукция России» : www.gostinfo.ru
ФА ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ система «Опасные товары» : www.sinatra-gost.ru
Область применения
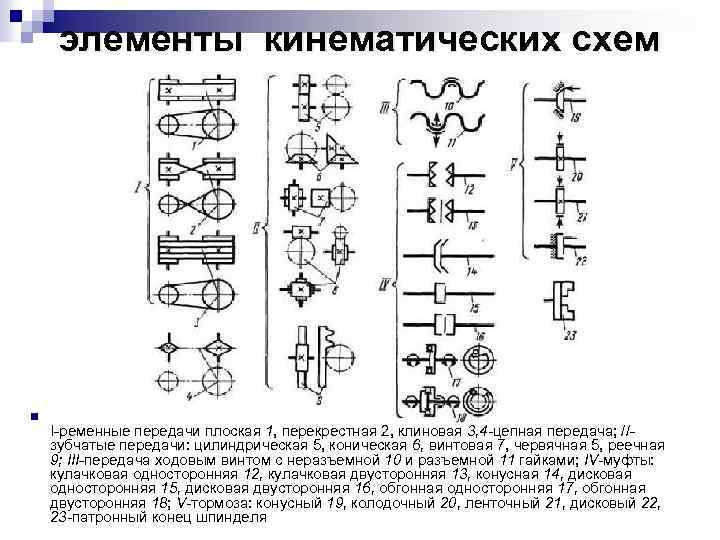
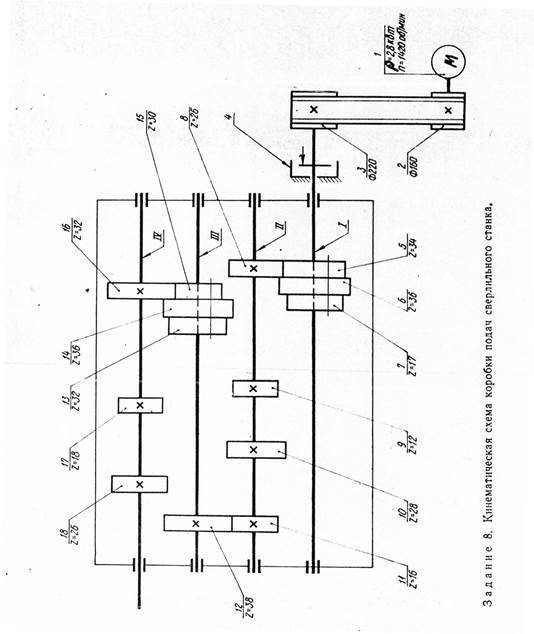
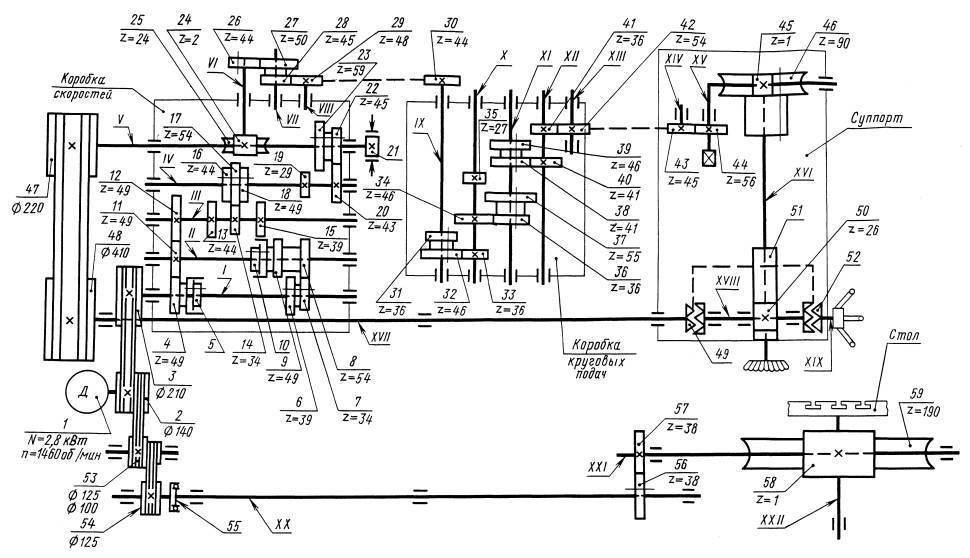
Для понимания взаимосвязей отдельных деталей в полной структуре агрегата составляются кинематические схемы. На них отображают последовательность передачи различных видов перемещения деталей: вращательного или поступательного движения. Например, можно последовательно проследить передачу вращения от электродвигателя через передаточные звенья к конечному устройству.
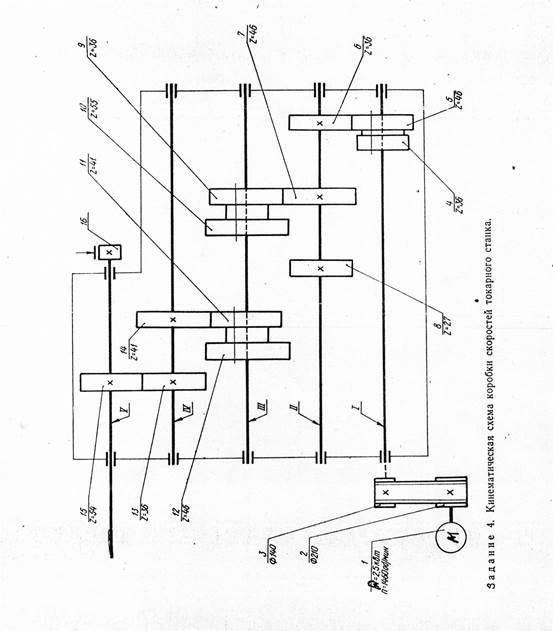
Например, кинематическая схема токарного станка наглядно показывает, как передаётся вращательное движение якоря двигателя, к редуктору и к исполнительному механизму (передней бабке). На ней отображается путь поступательного движения подачи заготовки и режущего инструмента. На каждой схеме все детали машин объединены в единый стройный механизм.
Подобные схемы позволяют понять принцип работы самых сложных механизмов. К таким системам относится газораспределительный механизм (ГРМ) двигателей внутреннего сгорания. При рассмотрении системы сжатия педального механизма можно определить физические параметры каждого элемента, величину и направление сил действующих на них.
Важное значение имеют подробные кинематические схемы, составленные для комплексных обрабатывающих центров. Схемы механизмов типа бипод обладают гибридной кинематической структурой
Они объединяют: станину, механизмы параллельной кинематики, систему удержания заготовок и подачи режущего инструмента. Механизм подачи инструмента специальный многоцелевой механизм для содержания различного режущего инструмента и подачи его в необходимое время к поверхности заготовки для осуществления обработки поверхности.
Как работает станок с ЧПУ?
Рассмотрим то, как осуществляется программирование станков с ЧПУ, в частности по такому же алгоритму осуществляется программирование станков с ЧПУ со стойкой FANUC:
Создание программы:
- Всё начинается с детали. Технологи исходя из требований к детали и её формы выбирают нужный станок для её изготовления. Вообще станков может быть несколько. Но в нашем примере мы принимаем то, что деталь делается только на фрезерном станке с ЧПУ. Технолог так же разрабатывает рекомендации по тому, как обрабатывать деталь – на каких режимах резания и каким инструментом.
- Затем определяется нулевая точка детали. От этого будет зависеть – как наладчик будет привязывать инструмент к заготовке и от какой точки будет писаться программа.
- Затем подбирают подходящую заготовку с необходимыми припусками на обработку и закрепление. Заготовки должны быть достаточно одинаковые, иначе программа будет выполнятся дольше, в связи с необходимостью обрабатывать большие припуски отдельных заготовок.
- Программист пишет программу для станка с ЧПУ. Наладчик записывает программу в память станка с ЧПУ.
Наладчик становит необходимый инструмент и привязывает его координаты.
Заготовку закрепляют на станке, и наладчик выставляет нуль заготовки, согласно программе
Наладчик запускает программу в покадровом режиме, на минимальной ускоренной подаче
Особое внимание уделяется местам программы, где используется ускоренный ход и смена инструмента. Нужно следить за тем, чтобы стружка хорошо удалялась из места резания, система подачи СОЖ была настроена правильно.
После отработки программы измеряются геометрические параметры деталей
В случае отклонения от требуемых параметров необходимо ввести корректировки в коррекцию инструмента или текст программы.
После того, как получилось добиться правильных геометрических параметров можно изготавливать детали в автоматическом режиме. Это уже делает оператор.
При запущенной автоматической обработке оператору необходимо постоянно следить за работой станка. Всегда есть вероятность поломки инструмента и скопления стружки.
Чтение кинематических схем
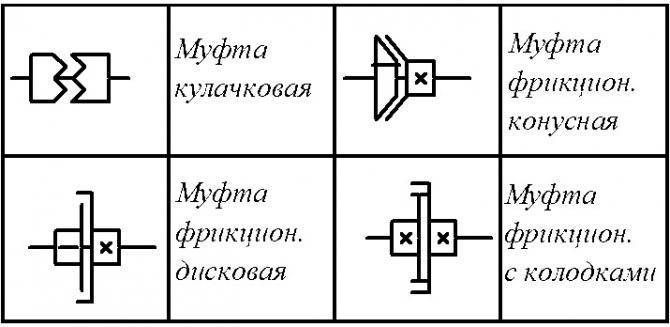
Система отечественных стандартов определяет перечень и правила обозначения каждой используемой детали. Таких изображений существует более двух сотен.Все знаки располагаются с соблюдением последовательности передачи движения от элемента к элементу. Они имеют своё графическое изображение. Например, подшипники качения и скольжения обозначаются двумя параллельными линиями заданной толщины. Муфта отображается в виде системы зубьев, которые входят в зацепление. В зависимости от применяемого знака, можно определить, какая муфта изображена: предохранительная или кулачковая.
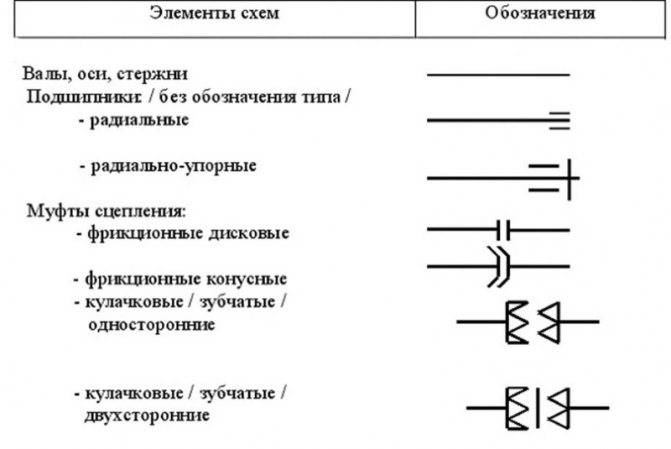
Для станков, вал обозначается длиной сплошной линией, на котором располагаются различные элементы. Обозначение червячной передачи позволяет определить направление передачи обоих видов движений: поступательного и вращательного.
Чтение названий осуществляется на основании принятых наименований.Каждое имеет свою аббревиатуру. Она состоит из одной заглавной буквы и одной цифры. Вид обозначается заглавными буквами, например,К – кинематические, Г – гальванические. Тип цифрами, например, 1 – структурные, 2 – функциональные, 3 – принципиальные. Более подробный перечень таких обозначений можно найти в соответствующих таблицах. Таким образом, название может состоять из нескольких обозначений: ЭЗ – это схема электрическая принципиальная; К3 – кинематическая принципиальная.
ПРИЛОЖЕНИЕ
Таблица 1
Буквенные коды наиболее распространенных групп элементов
Группа элементов механизмов | Примеры элементов | |
А | Механизм (общее обозначение) | |
В | Валы | |
С | Элементы кулачковых механизмов | Кулачок |
Толкатель | ||
Е | Разные элементы | |
Н | Элементы механизмов с гибкими звеньями | Ремень |
Цепь | ||
К | Элементы рычажных механизмов | Коромысло |
Кривошип | ||
Кулиса | ||
Шатун | ||
М | Источник движения | Двигатель |
Р | Элементы мальтийских и храповых механизмов | |
Т | Элементы зубчатых и фрикционных механизмов | Зубчатое колесо |
Зубчатая рейка | ||
Зубчатый сектор | ||
Червяк | ||
X | Муфты, тормоза | |
У |
Таблица 2
Рекомендуемая форма перечня элементов
Позиц. обозначение | Наименование | Количество | Примечание | |
Таблица 3
Примерный перечень основных характеристик и параметров кинематических элементов
Данные, указываемые на схеме | |
1. Источник движения (двигатель) | Наименование, тип, характеристика |
2. Механизм, кинематическая группа | Характеристика основных исполнительных движений, диапазон регулирования и т.д. |
Передаточные отношения основных элементов. | |
Размеры, определяющие пределы перемещений: длину перемещения или угол поворота исполнительного органа. | |
Направление вращения или перемещения элементов, от которых зависит получение заданных исполнительных движений и их согласованность. | |
Допускается помещать надписи с указанием режимов работы изделия или механизма, которым соответствуют указанные направления движения. | |
Примечание. Для групп и механизмов, показанных на схеме условно, без внутренних связей, указывают передаточные отношения и характеристики основных движений | |
3. Отсчетное устройство | Предел измерения или цена деления |
4. Кинематические звенья: | |
а) шкивы ременной передачи | Диаметр (для сменных шкивов — отношение диаметров ведущих шкивов к диаметрам ведомых шкивов) |
б) зубчатое колесо | Число зубьев (для зубчатых секторов — число зубьев на полной окружности и фактическое число зубьев), модуль, для косозубых колес — направление и угол наклона зубьев |
в) зубчатая рейка | Модуль, для косозубых реек — направление и угол наклона зубьев |
г) червяк | Модуль осевой, число заходов, тип червяка (если он не архимедов), направление витка и диаметр червяка |
д) ходовой винт | Ход винтовой линии, число заходов, надпись «лев», — для левых резьб |
е) звездочка цепной передачи | Число зубьев, шаг цепи |
ж) кулачок | Параметры кривых, определяющих скорость и пределы перемещения поводка (толкателя) |
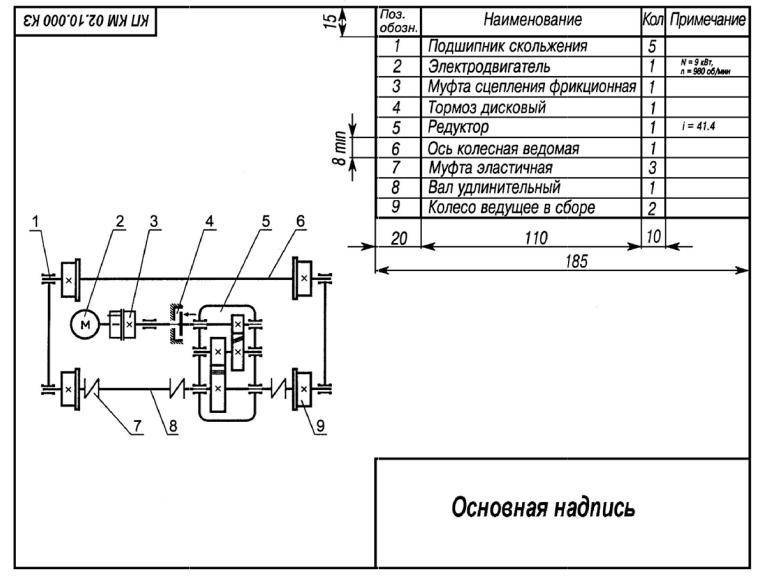


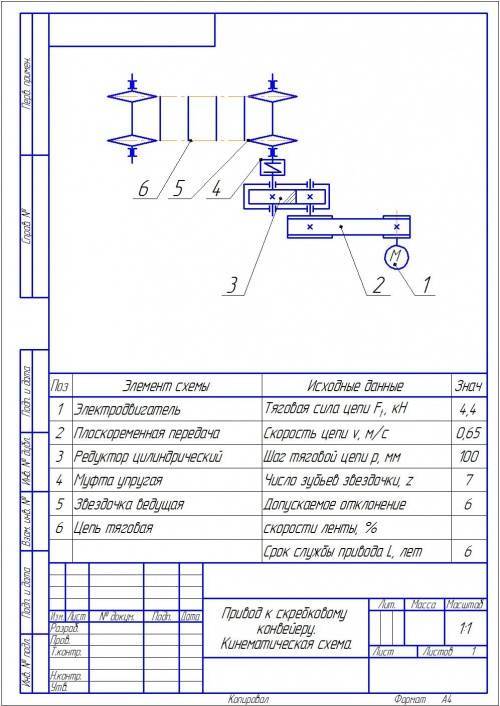
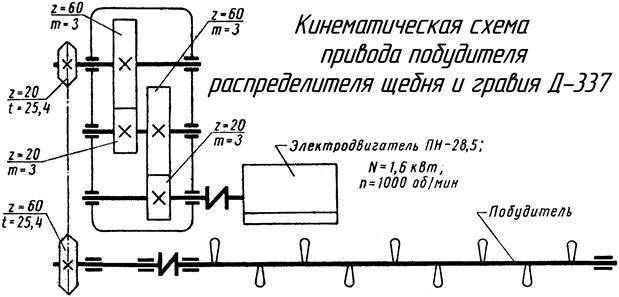
Кинематическая схема привода
В любом приводе все элементы, связанные между собой, оказывают определенное влияние друг на друга
То есть изучения движения только одного звена будет недостаточно, важно учитывать и их взаимное влияние. Для этого все силы в конструкции приводят к единой точке, как правило, это вал двигателя
Кинематическую схему привода называют эквивалентной, а параметры — приведенными.
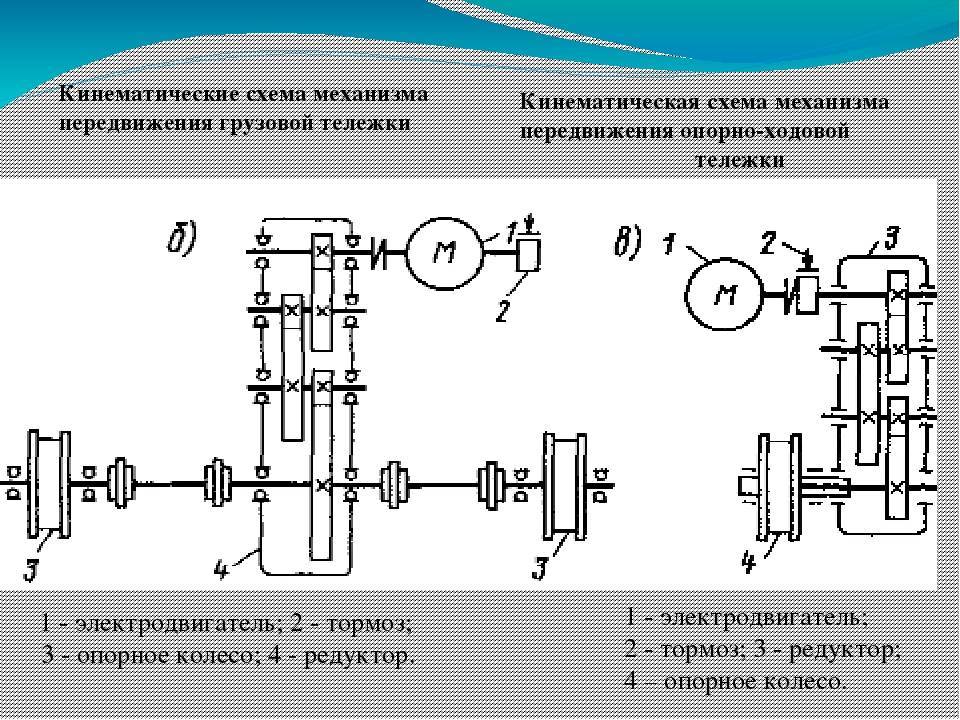
Схемы этого оборудования состоят из таких основных элементов, как:
- электродвигатель;
- открытая передача;
- редуктор;
- приводной вал машины;
- муфта.
Это классический состав кинематической схемы, некоторые элементы могут отсутствовать.
Электрические схемы для авто своими руками
В каждом автомобиле завод изготовитель оставляет недоработки, которые обнаруживаются в течение времени. Основным недостатком машин является отсутствие контроля бортовой сети.
Есть 2 варианта решения проблемы:
- Купить радиокомпоненты и собрать автосхему контроля бортовой сети самостоятельно.
- Купить готовый прибор, установить в приборную панель и правильно подключить к бортовой сети. Индикатор подсоединяется согласно приведенной схеме. Понадобится несколько метров монтажного провода и инструмент.

Контроль бортовой сети автомобиля
Также к доработке можно отнести схему подключения противотуманных фар, которая довольна проста для начинающего автоэлектрика:
- В первую очередь необходимо установить сами фары.
- Установить кнопку включения на панели управления, а также релейную аппаратуру.
- Выполнить монтаж согласно схеме, соблюдая полярность подключения, которое следует производить при отключенной клемме аккумулятора. Обязательно необходимо установить предохранитель согласно указанной схеме.
Загрузка …
Общие требования к составлению электросхем
На электрических схемах станка с ЧПУ (речь идет про принципиальные) обычно изображают каждый элемент электрооборудования, участвующий в технологическом процессе или контролирующего его течение. Принято слева размещать силовые цепи, обозначая жирной линией, а для цепей управления место на схеме – с правой стороны они изображены в виде тонкой линии. Составляя схему, условно считают, что все элементы цепей в отключенном состоянии.
У элементов – схематическое представление, им даны позиционные обозначения в виде букв. В случае одного электродвигателя – М, а если их несколько – М1, М2, М3 (в буквенном и числовом выражении). Если строят схемы расположения, на них (в масштабном изображении) фиксируют все, что относится к электрооборудованию. Там, где место для элементов соединения – проводов и кабелей, – тонкая линия. Такие схемы строятся, изображая конкретные узлы фрезера, их имеет электрошкаф и пульт управления станком.
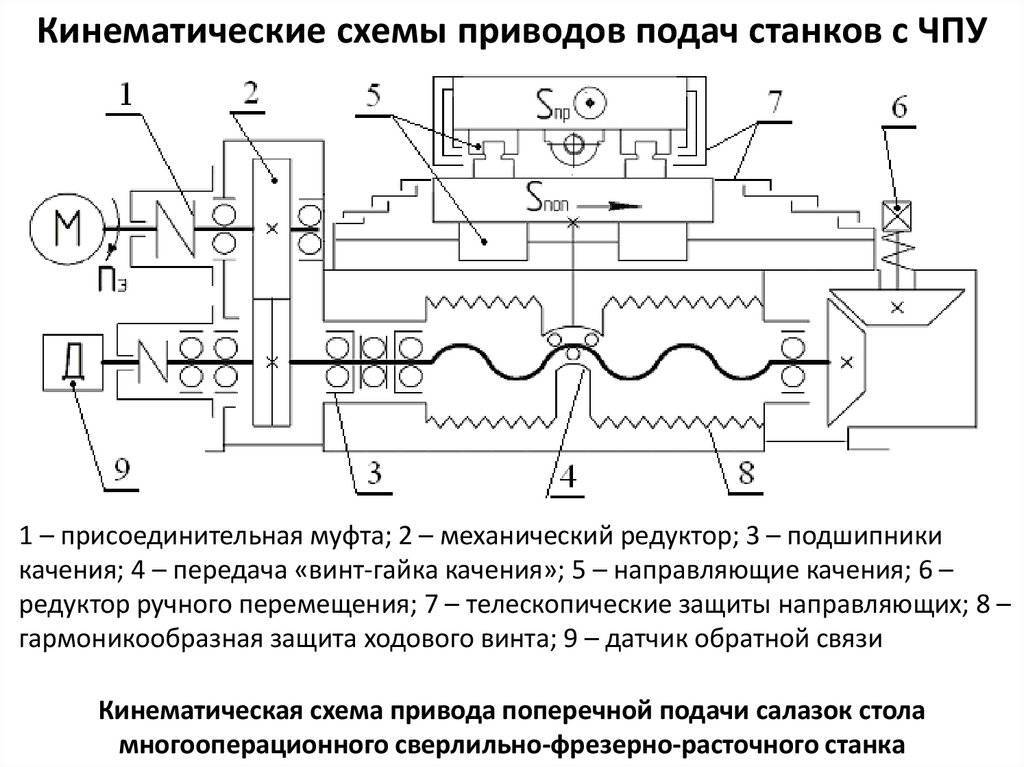
Как пример схемы силового оборудования устройства с числовым управлением, можно представить такую:
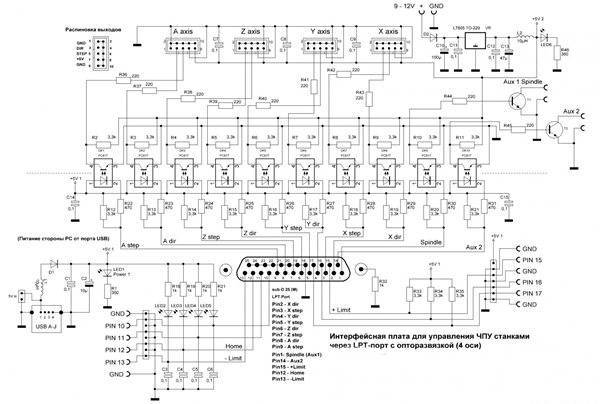
Современное электрооборудование имеет весьма сложные схемы, и читать их не всегда просто. А объясняется ситуация тем, что помимо электродвигателей, реле, пускателей и контакторов, станок включает немало автоматических средств, вычислительную технику, блоки микроэлектронной аппаратуры. Разные станки, в совокупности, имеют общий электрический компонент и, в то же время, отличаются особенностями функционала блоков.
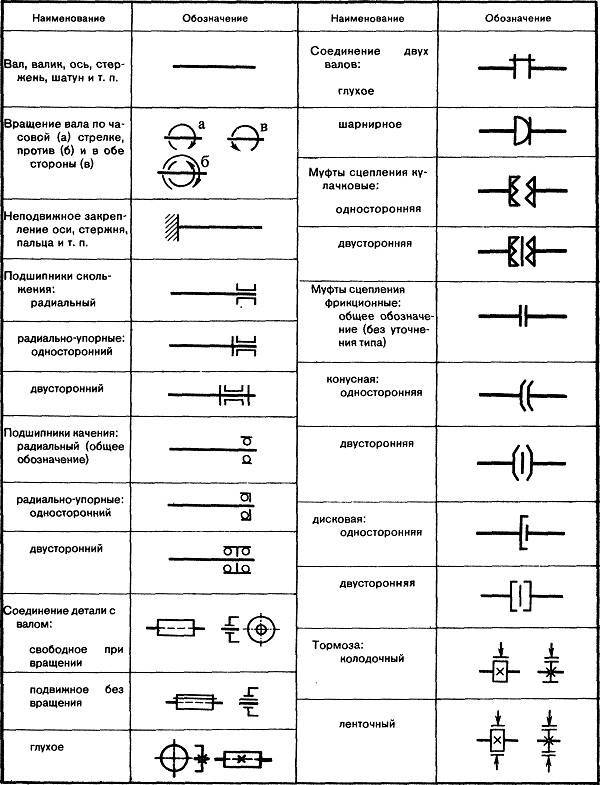
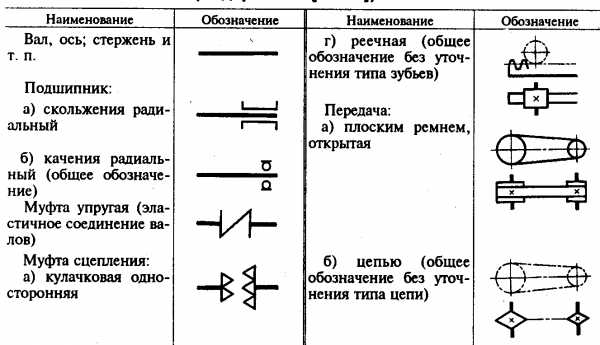
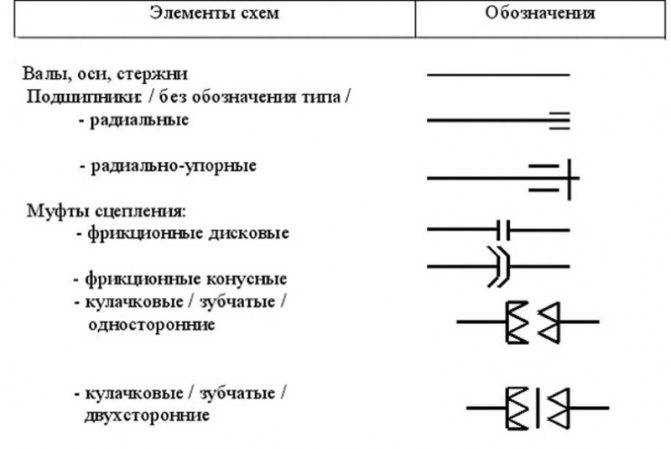
Условные обозначения элементов на кинематических схемах станков
Условные обозначения элементов на кинематических схемах станков
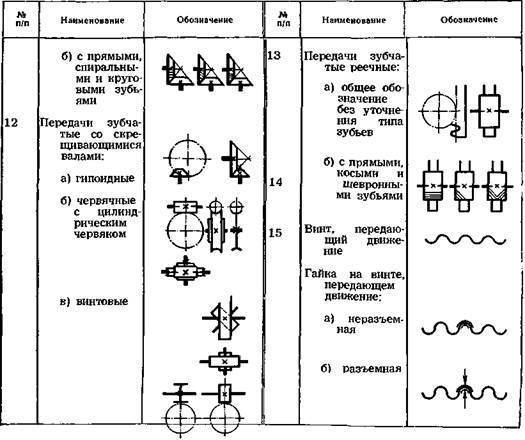
В машиностроение при вычерчивании различных кинематических схем используют условные обозначения их элементов, утвержденные ГОСТ 2.770-68, ГОСТ 2.782-68 и ГОСТ 2.782-68 (таблица 1).Таблица 1 — Условные обозначения элементов кинематических схем
| Наименование | Тип | Условные обозначения |
| Подшипники скольжения и качения на валу без уточнения типа | – радиальные | |
| – упорные | ||
| Подшипники скольжения | – радиальный | |
| – радиально-упорный односторонний | ||
| – радиально-упорный двусторонний | ||
| – упорный односторонний | ||
| – упорный двусторонний | ||
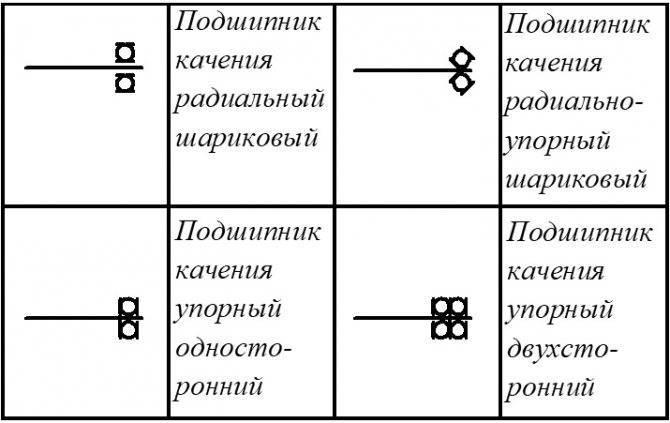
| Подшипники качения | – радиальный | |
| – радиально-упорный односторонний | ||
| – радиально-упорный двусторонний | ||
| – упорный односторонний | ||
| – упорный двусторонний | ||
| Муфта | (общее обозначение без уточнения типа) | |
| Муфты нерасцепляемые (неуправляемые) | – глухая | |
| – упругая | ||
| – компенсирующая | ||
| Муфты сцепляемые (управляемые) | – общее назначение | |
| – односторонняя | ||
| – двусторонняя | ||
| Муфты сцепляемые механические | – синхронная (например, зубчатая) | |
| – асинхронная (например, фрикционная) | ||
| Муфта сцепляемая электрическая | ||
| Муфта сцепляемая гидравлическая или пневматическая | ||
| Муфты автоматические (самодействующие) | ||
| – обгонная (свободного действия) | ||
| – центробежная фрикционная | ||
| – предохранительная с разрушающим элементом | ||
| – предохранительная с неразрушающим элементом | ||
| Тормоз | (общее обозначение без уточнения типа) | |
| Храповые зубчатые механизмы | – с наружным зацеплением (односторонний) | |
| – с внутренним зацеплением (односторонний) | ||
| Шкив ступенчатый, закрепленный на валу | ||
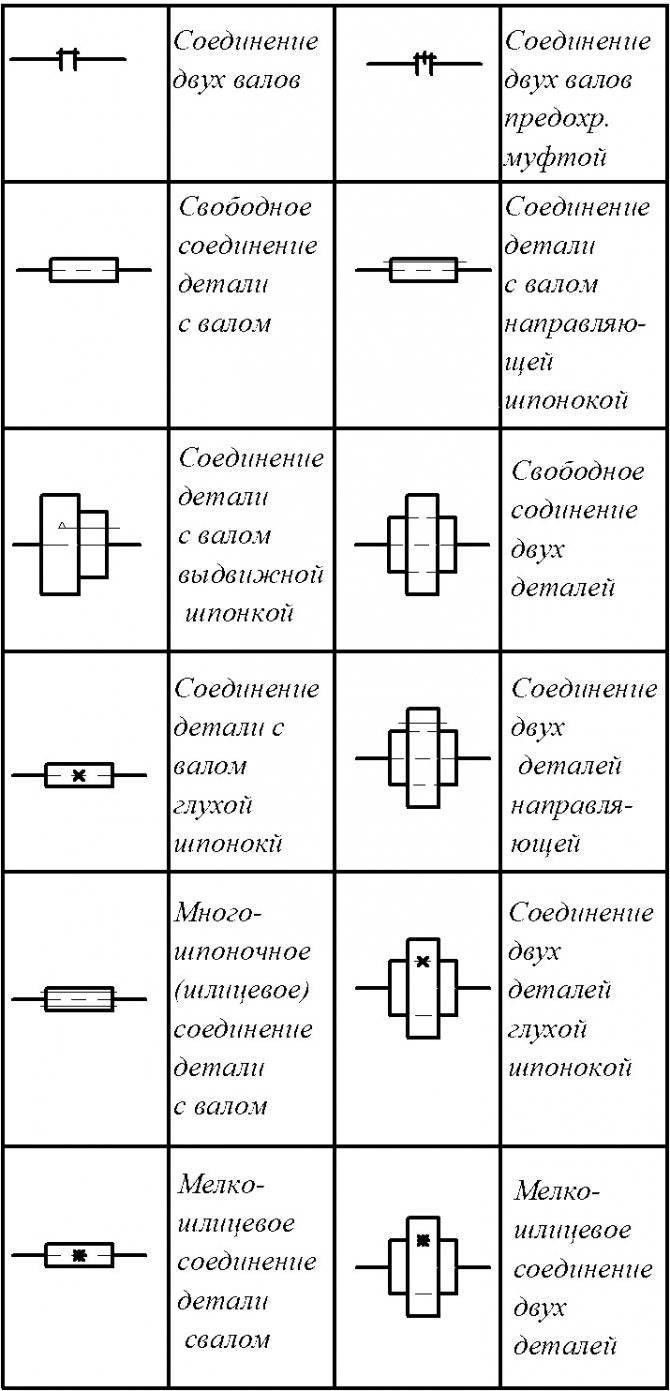
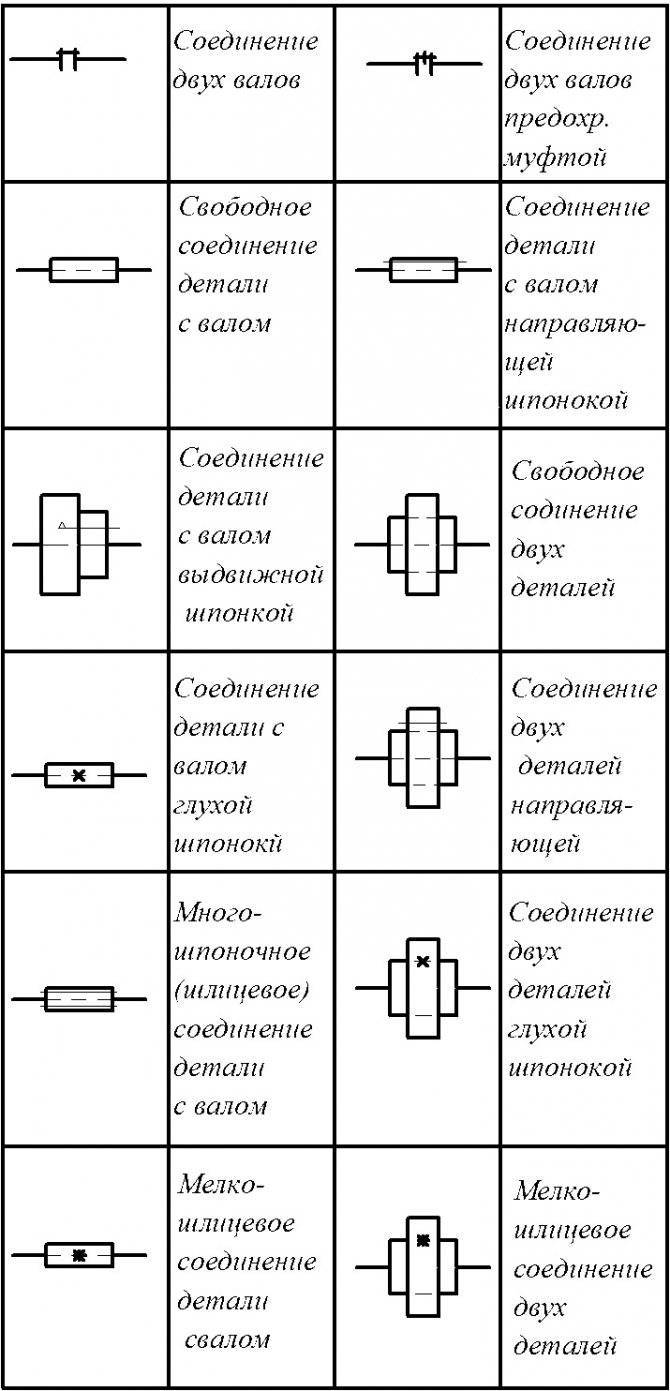
| Соединения детали с валом | – свободное вращение | |
| – подвижное без вращения | ||
| – с помощью вытяжной шпонки | ||
| – глухое | ||
| Передачи фрикционные | – с цилиндрическими роликами | |
| – с коническими роликами | ||
| – с коническими роликами регулируемыми | ||
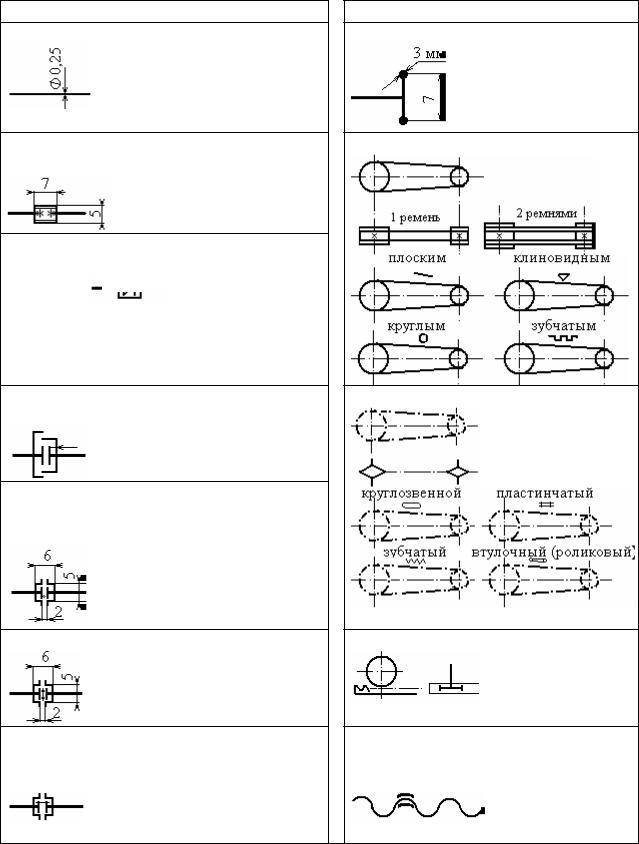
| Передачи ременные | – без уточнения типа ремня | |
| – плоским ремнем | ||
| – клиновидным ремнем | ||
| – круглым ремнем | ||
| – зубчатым ремнем | ||
| Передача цепью | (общее обозначение без уточнения типа цепи) | |
| Передачи зубчатые цилиндрические с внешним зацеплением | – общее обозначение без уточнения типа зубьев | |
| – прямыми, косыми и шевронными зубьями | ||
| Передачи зубчатые цилиндрические с внутренним зацеплением | – общее обозначение без уточнения типа зубьев | |
| Передачи зубчатые с пересекающимися валами | (конические без уточнения типа зубьев) | |
| Передачи зубчатые со скрещивающимися валами | (червячные с цилиндрическим червяком) | |
| Передачи зубчатые реечные | (общее обозначение без уточнения типа зубьев) | |
| Передачи зубчатые сектором | (общее обозначение без уточнения типа зубьев) | |
| Винт, передающий движение | ||
| Винт – гайка качения | ||
| Винт – гайка скольжения | – гайка неразъемная | |
| – гайка разъемная | ||
| Электродвигатель | ||
| Насос | (без уточнения типа) |
Как читать кинематические схемы станков
Для того, чтобы научиться читать кинематические схемы, необходимо знать обозначения отдельных элементов и научиться понимать взаимодействие отдельных составляющих. В первую очередь изучим наиболее обозначения наиболее распространенных элементов, условные обозначения на кинематических схемах представлены в ГОСТ 3462-52.
Обозначение подшипников на схемах
Обозначение подшипника зависит от его типа.
Подшипник скольжения изображается в виде обычных скоб-опор. Если подшипник упорный опоры изображаются под углом.

Шариковые подшипники на кинематических схемах станков изображаются следующим образом.
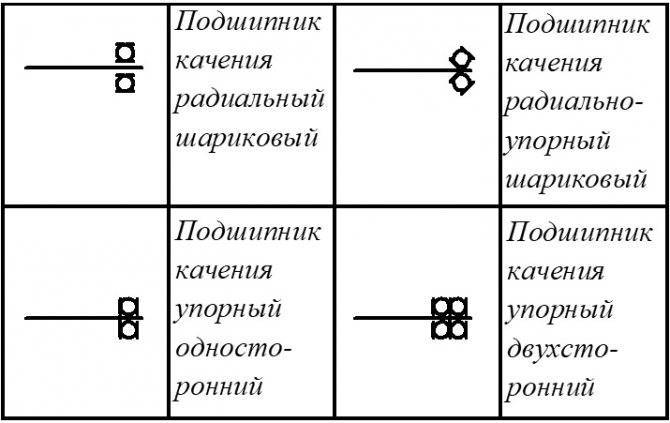
Шарики в подшипниках условно изображены в виде круга.
Читать также: Индуктивное сопротивление единица измерения
В условных изображениях роликовых подшипников ролики показаны в виде прямоугольников.

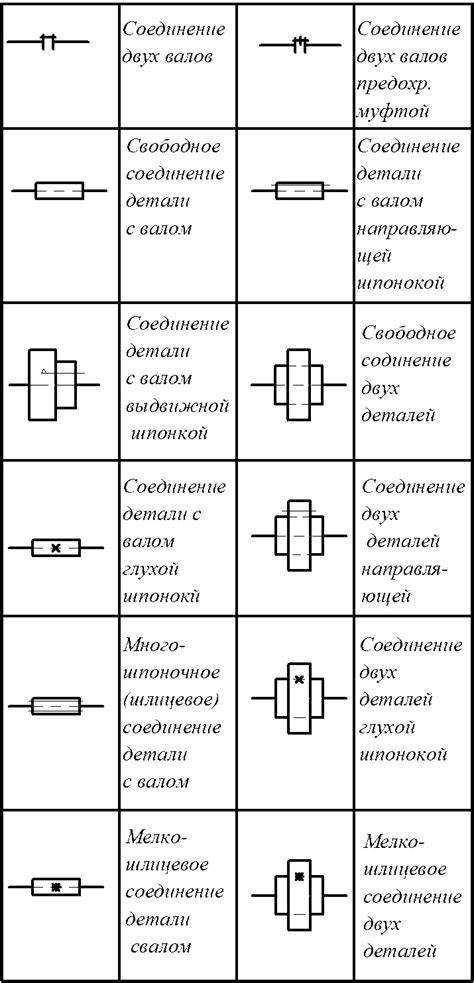
В кинематических схемах изображаются различные типы соединений валов и деталей.
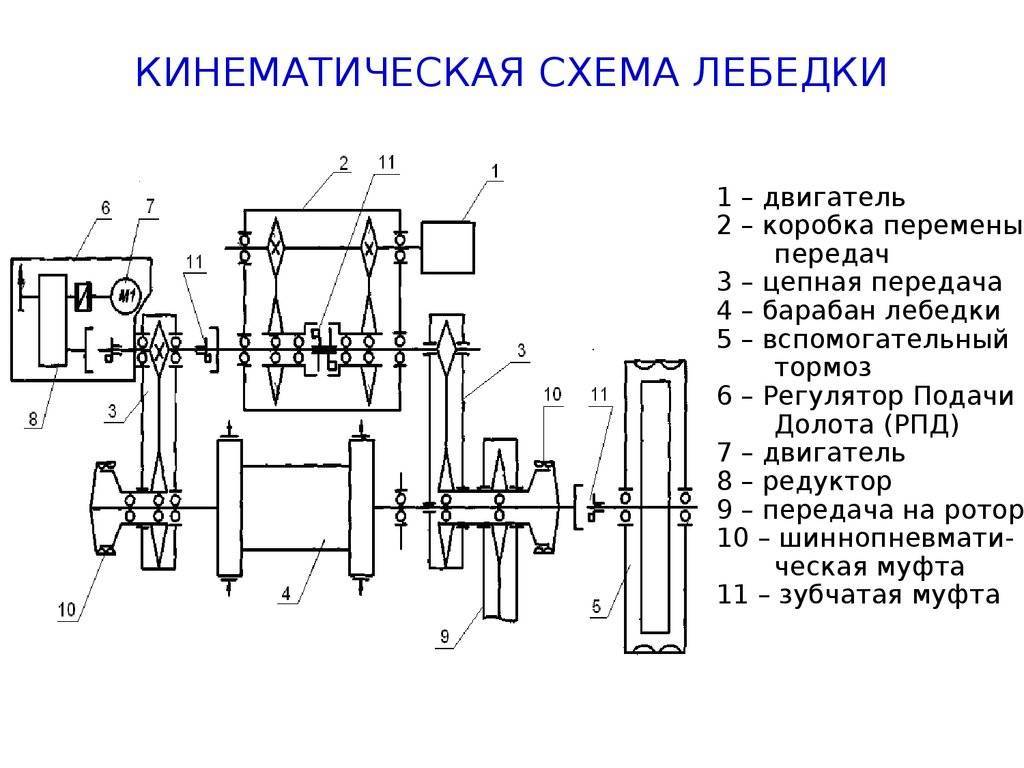
Муфты на кинематической схеме
Условное обозначенние муфты зависит от ее типа, наиболее распространенные из них:
Обозначения односторонних муфт на кинематических схемах станков показано на рисунке.
Обозначение двусторонней муфты можно получить зеркально отобразив по горизонтали схему односторонней.
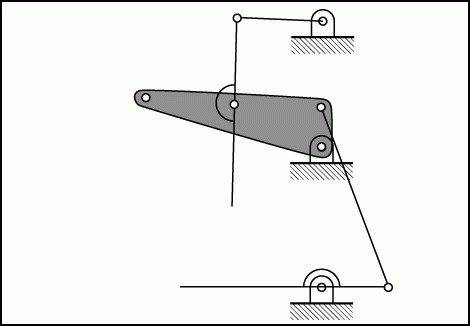
Что такое схема кинематическая? Основные понятия
Если коротко ответить на этот вопрос, то кинематическая схема — это некий рисунок или документ, если так можно выразиться, на котором изображены все механические звенья с указанием размеров. Очень часто звенья схемы называют кинематическими парами. Если дать определение научным языком, то это сопряженные твердые элементы в количестве 2 штук, которые благодаря условиям связи ограничивают движение друг друга.






Наличие размеров необходимо для проведения кинематического анализа, который изучает основы движения механизмов, их траектории и скорости. Решить задачи кинематики можно как графически, так и экспериментально.
В общем, о кинематической схеме мы говорим тогда, когда анализируем тип механизма. Им называют некую систему тел, которая преобразует движение одних для требуемого движения других. В состав любого механического элемента входят звенья — несколько твердых частиц, жестко соединенных между собой. Звено, которое считают неподвижным, называют стойкой.
Элементом кинематической пары или звена называют систему поверхностей и линий, по которой одно звено соприкасается с другим. Эту точку еще именуют узлом сопряжения.

Виды электрических схем
При разнесенном способе представления допускается к номеру добавлять условный номер изображений части элемента или устройства, отделяя его точкой. Они бывают открытой и скрытой установки, соответственно, групп значков тоже две. В настоящее время у населения и в торговой сети находится в эксплуатации значительное количество разнообразных электронных приборов и устройств, радио- и телевизионной аппаратуры, которые изготавливаются зарубежными фирмами и различными акционерными обществами.
В — Токоведущая или заземляющая шина. Есть замыкающий, размыкающий, переключающий контакты. Различие — положение черты на изображении клавиши.
I — Ответвления. И каждому проектировщику приходится отслеживать изменения и новые требования нормативных документов, изменения в линейках производителей электрооборудования, постоянно поддерживать свою квалификацию на должном уровне. Условные графические изображения на основании ГОСТ D — контакты коммутационных приборов:. Их изображения отличаются тем, что кружки закрашены. Читаем принципиальные электрические схемы
Правила выполнения схем
Существует несколько основных законов составления кинематических чертежей:
- Документ может быть выполнен как на бумаге, так и на электронном носителе. Рекомендуется составлять конструкторские схемы на одном листе с возможностью деления его на необходимые форматы при печати.
- В случае использования сложных схем допускается применение мультимедийных средств, то есть можно показать движение в динамике наглядным образом.
Кинематические чертежи подразделяют на три вида: принципиальные, структурные и функциональные. Правила их составления также отличаются друг от друга.
Что касается принципиальных схем, то на рисунке обязательно должны быть нанесены все виды связей между элементами. Документ предоставляют в виде развертки. Принципиальная кинематическая схема, обозначения которой разработчик указывает на полях, должна изображаться в контуре изделия в аксонометрической проекции. Более подробные правила по их составлению можно узнать по ГОСТ 2.303 и 2.701.
Главное отличие структурных схем от принципиальных заключается в том, что на первых изображаются функциональные части изделия и отношения между ними. Как правило, их представляют в виде графических изображений или аналитической записи.
Функциональные схемы иллюстрируют взаимосвязи между частями элементов, которые изображаются простыми геометрическими фигурами.
ПРИЛОЖЕНИЕ
Таблица
1
Буквенные коды
наиболее распространенных групп элементов
Буквенный код | Группа элементов механизмов | Примеры элементов |
А | Механизм (общее обозначение) | |
В | Валы | |
С | Элементы кулачковых механизмов | Кулачок |
Толкатель | ||
Е | Разные элементы | |
Н | Элементы механизмов с гибкими звеньями | Ремень |
Цепь | ||
К | Элементы рычажных механизмов | Коромысло |
Кривошип | ||
Кулиса | ||
Шатун | ||
М | Источник движения | Двигатель |
Р | Элементы мальтийских и храповых механизмов | |
Т | Элементы зубчатых и фрикционных механизмов | Зубчатое колесо |
Зубчатая рейка | ||
Зубчатый сектор | ||
Червяк | ||
X | Муфты, тормоза | |
У |
Таблица
2
Рекомендуемая форма перечня элементов
Зона | Позиц. обозначение | Наименование | Количество | Примечание |
Таблица
3
Примерный перечень основных характеристик и параметров
кинематических элементов
Наименование | Данные, указываемые на схеме |
1. Источник движения (двигатель) | Наименование, тип, характеристика |
2. Механизм, кинематическая группа | Характеристика основных исполнительных движений, диапазон |
Передаточные отношения основных элементов. | |
Размеры, определяющие пределы перемещений: длину перемещения или | |
Направление вращения или перемещения элементов, от которых | |
Допускается помещать надписи с указанием режимов работы изделия | |
Примечание. Для групп и механизмов, показанных на схеме условно, без | |
3. Отсчетное устройство | Предел измерения или цена деления |
4. Кинематические звенья: | |
а) шкивы ременной передачи | Диаметр (для сменных шкивов — отношение диаметров ведущих шкивов |
б) зубчатое колесо | Число зубьев (для зубчатых секторов — число зубьев на полной |
в) зубчатая рейка | Модуль, для косозубых реек — направление и угол наклона зубьев |
г) червяк | Модуль осевой, число заходов, тип червяка (если он не |
д) ходовой винт | Ход винтовой линии, число заходов, надпись «лев», — для левых |
е) звездочка цепной передачи | Число зубьев, шаг цепи |
ж) кулачок | Параметры кривых, определяющих скорость и пределы перемещения |



Воспринимающая часть электромеханических устройств (ГОСТ 2.756-76)
| Наименование | Обозн. | Наименование | Обозн. |
| Катушкаэлектромеханического устройства | Катушкаэлектромеханического устройства, имеющего механическуюблокировку | ||
| Воспринимающая часть электротеплового реле | Катушкаэлектромеханического устройства, работающего с ускорением при срабатывании | ||
| Катушка поляризованного электромеханического устройстваПримечание . Допускается применять следующее обозначение | Катушкаэлектромеханического устройства, работающего с ускорением при срабатывании и отпускании | ||
| Катушкаэлектромеханического устройства, работающего с замедлением при срабатывании | |||
| Обмотка максимального тока | Катушкаэлектромеханического устройства, работающего с замедлением при отпускании | ||
| Обмотка минимального напряжения | Катушкаэлектромеханического устройства, работающего с замедлением при срабатывании и отпускании |
кинематическая схема — это… Что такое кинематическая схема?
кинематическая схема кинематическая схема —
Тематики
энергетика в целом
Справочник технического переводчика. – Интент. 2009-2013.
- кинематическая система координат
- кинематическая схема механизма
Смотреть что такое «кинематическая схема» в других словарях:
- КИНЕМАТИЧЕСКАЯ СХЕМА — схема, на к рой с помощью условных обозначений изображаются звенья механизма и кинематические пары с указанием размеров, необходимых для кинематич. анализа (см. Кинематика) … Большой энциклопедический политехнический словарь
- кинематическая схема механизма — Структурная схема механизма с указанием размеров звеньев, необходимых для кинематического анализа механизма. [Сборник рекомендуемых терминов. Выпуск 99. Теория механизмов и машин. Академия наук СССР. Комитет научно технической терминологии. 1984… … Справочник технического переводчика
- кинематическая схема механизма — kinematic diagram of a mechanism Схема механизма, выполненная в масштабе. Шифр IFToMM: Раздел: СТРУКТУРА МЕХАНИЗМОВ … Теория механизмов и машин
- кинематическая схема механизма — Графическое изображение механизма с применением условных обозначений звеньев и кинематических пар и указанием размеров, необходимых для кинематического анализа механизма … Политехнический терминологический толковый словарь
- Принципиальная кинематическая схема — Кинематическая схема револьверной головки токарного станка При … Википедия
- Кинематическая пара — подвижное сопряжение двух твёрдых звеньев, налагающее ограничения на их относительное движение условиями связи. Каждое из условий связи устраняет одну Степень свободы, то есть возможность одного из 6 независимых относительных движений в… … Большая советская энциклопедия
- пусковая система — Рис. 1. Схема воздушной пусковой системы многодвигательного самолёта. пусковая система газотурбинного двигателя совокупность устройств, предназначенных для принудительной раскрутки ротора газотурбинного двигателя при его запуске. П. с.… … Энциклопедия «Авиация»
- пусковая система — Рис. 1. Схема воздушной пусковой системы многодвигательного самолёта. пусковая система газотурбинного двигателя совокупность устройств, предназначенных для принудительной раскрутки ротора газотурбинного двигателя при его запуске. П. с.… … Энциклопедия «Авиация»
- Манипулятор — Кинематическая схема одноручного манипулятора с пятью степенями свободы. Стрелками показаны направления возможных перемещений звеньев. МАНИПУЛЯТОР, 1) управляемый механизм, повторяющий движения (действия, манипуляции) руки человека при… … Иллюстрированный энциклопедический словарь
- Делительная головка — приспособление для станков (главным образом фрезерных), позволяющее периодически поворачивать обрабатываемое изделие на равные и неравные доли оборота. Различают Д. г. механические (в том числе простые и универсальные) и оптические.… … Большая советская энциклопедия
technical_translator_dictionary.academic.ru
Чтение кинематических схем
Система отечественных стандартов определяет перечень и правила обозначения каждой используемой детали. Таких изображений существует более двух сотен.Все знаки располагаются с соблюдением последовательности передачи движения от элемента к элементу. Они имеют своё графическое изображение. Например, подшипники качения и скольжения обозначаются двумя параллельными линиями заданной толщины. Муфта отображается в виде системы зубьев, которые входят в зацепление. В зависимости от применяемого знака, можно определить, какая муфта изображена: предохранительная или кулачковая.
Для станков, вал обозначается длиной сплошной линией, на котором располагаются различные элементы. Обозначение червячной передачи позволяет определить направление передачи обоих видов движений: поступательного и вращательного.
Чтение названий осуществляется на основании принятых наименований.Каждое имеет свою аббревиатуру. Она состоит из одной заглавной буквы и одной цифры. Вид обозначается заглавными буквами, например,К – кинематические, Г – гальванические. Тип цифрами, например, 1 – структурные, 2 – функциональные, 3 – принципиальные. Более подробный перечень таких обозначений можно найти в соответствующих таблицах. Таким образом, название может состоять из нескольких обозначений: ЭЗ – это схема электрическая принципиальная; К3 – кинематическая принципиальная.
Как читать кинематические схемы станков
Для того, чтобы научиться читать кинематические схемы, необходимо знать обозначения отдельных элементов и научиться понимать взаимодействие отдельных составляющих. В первую очередь изучим наиболее обозначения наиболее распространенных элементов, условные обозначения на кинематических схемах представлены в ГОСТ 3462-52.
Обозначение подшипников на схемах
Обозначение подшипника зависит от его типа.
Подшипник скольжения изображается в виде обычных скоб-опор. Если подшипник упорный опоры изображаются под углом.

Шариковые подшипники на кинематических схемах станков изображаются следующим образом.
Шарики в подшипниках условно изображены в виде круга.
Читать также: Цепной диск по дереву для болгарки 125
В условных изображениях роликовых подшипников ролики показаны в виде прямоугольников.

В кинематических схемах изображаются различные типы соединений валов и деталей.
Муфты на кинематической схеме
Условное обозначенние муфты зависит от ее типа, наиболее распространенные из них:
Обозначения односторонних муфт на кинематических схемах станков показано на рисунке.

Обозначение двусторонней муфты можно получить зеркально отобразив по горизонтали схему односторонней.
Воспринимающая часть электромеханических устройств (ГОСТ 2.756-76)
| Наименование | Обозн. | Наименование | Обозн. |
| Катушкаэлектромеханического устройства | Катушкаэлектромеханического устройства, имеющего механическуюблокировку | ||
| Воспринимающая часть электротеплового реле | Катушкаэлектромеханического устройства, работающего с ускорением при срабатывании | ||
| Катушка поляризованного электромеханического устройстваПримечание . Допускается применять следующее обозначение | Катушкаэлектромеханического устройства, работающего с ускорением при срабатывании и отпускании | ||
| Катушкаэлектромеханического устройства, работающего с замедлением при срабатывании | |||
| Обмотка максимального тока | Катушкаэлектромеханического устройства, работающего с замедлением при отпускании | ||
| Обмотка минимального напряжения | Катушкаэлектромеханического устройства, работающего с замедлением при срабатывании и отпускании |